פשע ברחוב נפוץ מאוד במאה המודרנית. כולם צריכים להרגיש בטוחים כשהם בבית או בזמן שישן בלילה או בשעות היום. לכן, קיימות בשוק מערכות אזעקת אבטחה רבות. מערכות אלו יעילות מאוד אך יקרות. א פּוֹרֵץ אזעקה או אזעקת פולש היא בעצם מכשיר אלקטרוני שמשמיע אזעקה כאשר הוא מזהה פורץ בבית. אנו יכולים ליצור מעגל אזעקת פריצה בבית אשר יהיה יעיל כמעט באותה מידה לטווח מרחק מסוים ויעלה בעלות נמוכה מאוד.

אזעקת אבטחה
מאמר זה עוסק בהפעלת אזעקת פולש באמצעות חיישן Arduino ו- PIR. כאשר חיישן ה- PIR יזהה פורץ, הוא ישלח אות לארדואינו והארדואינו ישמיע אזעקה. המעגל הזה פשוט מאוד ועוצב על גבי Veroboard. זֶה Veroboard יותקן באותו מקום של הבית שבו קיימת סכנת פורץ יותר להיכנס לבית.
כיצד לתכנן אזעקת פורץ מבוססת חיישנים?
הגישה הטובה ביותר להתחיל כל פרויקט היא להכין רשימת רכיבים ולעבור מחקר קצר על רכיבים אלה מכיוון שאף אחד לא ירצה להישאר באמצע פרויקט רק בגלל רכיב חסר. בואו נכין רשימת רכיבים, נרכוש אותם ונתחיל עם הפרויקט. לוח ה- Vero עדיף להרכבת המעגל על חומרה מכיוון שאם נרכיב את הרכיבים על קרש הלחם הם עלולים להתנתק ממנו והמעגל יהפוך קצר ומכאן, עדיף Veroboard.
שלב 1: איסוף הרכיבים (חומרה)
- נגד 10k-ohm
- לד
- זַמזָם
- סוללה 9V
- קליפ סוללה 9V
- Veroboard
- חוטי חיבור
- מוליטימטר דיגיטלי
שלב 2: רכיבים דרושים (תוכנה)
- Proteus 8 Professional (ניתן להוריד מ- כאן )
לאחר הורדת ה- Proteus 8 Professional, תכננו את המעגל עליו. צירפתי כאן הדמיות תוכנה כדי שיהיה נוח למתחילים לעצב את המעגל ולבצע חיבורים מתאימים לחומרה.
שלב 3: עבודה במעגל
העבודה במעגל זה פשוטה מאוד. בהתחלה, מצבו של חיישן ה- PIR מוגדר ל- LOW. זה אומר שלא מתגלה שום תנועה. כאשר זוהה תנועה על ידי חיישן ה- PIR, הוא ישלח אות למיקרו-בקר. המיקרו-בקר יפעיל את הבאזר והנורית. אם לא מתגלה תנועה, ה- LED והזמזם יישארו במצב כבוי.
שלב 4: הרכבת הרכיבים
כעת, כידוע החיבורים העיקריים וגם המעגל השלם של הפרויקט שלנו, הבה נתקדם ונתחיל לייצר את החומרה של הפרויקט שלנו. יש לזכור דבר אחד שהמעגל חייב להיות קומפקטי ואת המרכיבים חייבים להיות כל כך קרובים.
- קח ורובורד ושפשף את צדו בציפוי הנחושת בנייר מגרד.
- כעת הנח את הרכיבים בקפידה וסגור מספיק כדי שגודל המעגל לא יהפוך גדול במיוחד
- קח שתי חתיכות של כותרות נקבה והנח אותן על ה- Veroboard באופן שהמרחק ביניהן יהיה שווה לרוחב לוח הננו של ארדואינו. מאוחר יותר נרכיב את לוח הננו של Arduino בכותרות הנשיות האלה.
- בצע את החיבורים בזהירות באמצעות ברזל הלחמה. אם נעשית טעות כלשהי בעת ביצוע החיבורים, נסה להוריד את הסרת הלחמה ולהלחין את החיבור שוב כראוי, אך בסופו של דבר, החיבור חייב להיות הדוק.
- לאחר שנוצרו כל הקשרים, בצעו בדיקת המשכיות. באלקטרוניקה, מבחן ההמשכיות הוא בדיקת מעגל חשמלי כדי לבדוק אם זרם זרם בנתיב הרצוי (שזה בוודאות מעגל כולל). בדיקת המשכיות מתבצעת על ידי הגדרת מעט מתח (מחווט בסידור עם נורית LED או מהומה, למשל, רמקול פיזואלקטרי) על הדרך הנבחרת.
- אם מבחן ההמשכיות עובר, המשמעות היא שהמעגל נעשה כנדרש כנדרש. כעת הוא מוכן להיבדק.
- חבר את הסוללה למעגל.
כעת אמת את כל החיבורים על ידי עיון בתרשים המעגל להלן:

תרשים מעגלים
שלב 5: תחילת העבודה עם Arduino
אם אינכם מכירים את ה- Arduino IDE, אל דאגה מכיוון שמתואר בהמשך שלב אחר שלב להגדרה ושימוש ב- Arduino IDE עם לוח מיקרו-בקר.
- הורד את הגרסה האחרונה של Arduino IDE מ ארדואינו.
- חבר את לוח ה- Arduino Nano למחשב הנייד שלך ופתח את לוח הבקרה. בלוח הבקרה, לחץ על חומרה וסאונד . עכשיו לחץ על התקנים ומדפסות. כאן מצא את היציאה שאליה מחובר לוח המיקרו שלך. במקרה שלי זה כן COM14 אבל זה שונה במחשבים שונים.
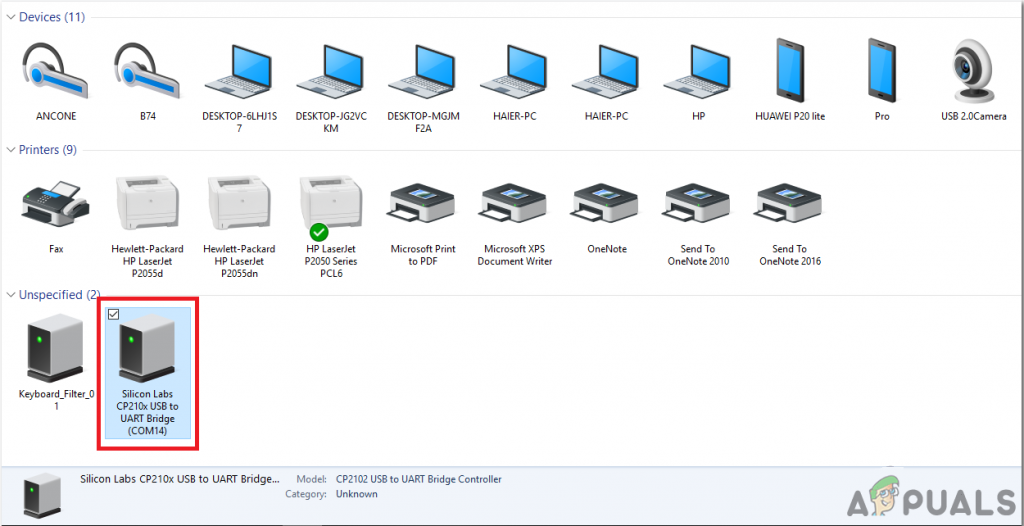
מציאת נמל
- לחץ על תפריט הכלים. והגדר את הלוח ל ארדואינו ננו מהתפריט הנפתח.
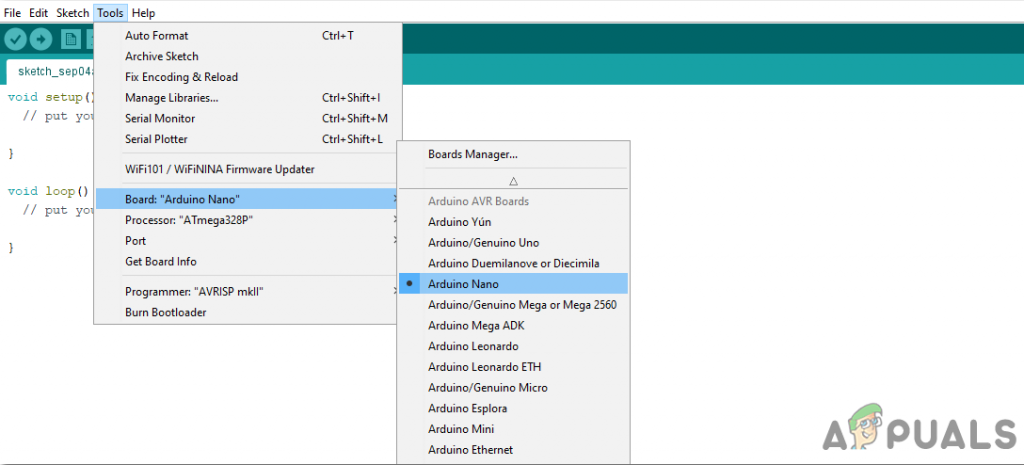
לוח הגדרה
- באותו תפריט כלים, הגדר את היציאה למספר היציאה שצפית קודם ב- התקנים ומדפסות .
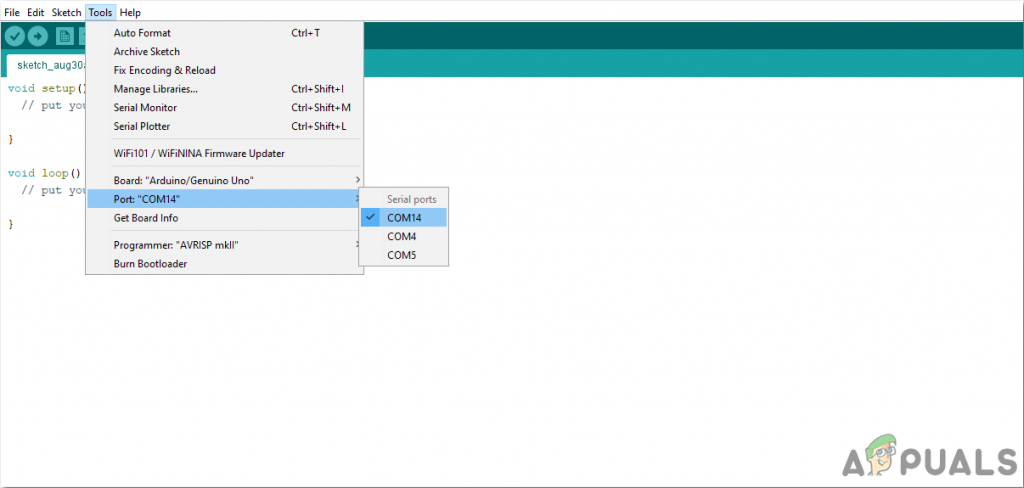
הגדרת נמל
- באותו תפריט כלים, הגדר את המעבד ל ATmega328P (Bootloader ישן).
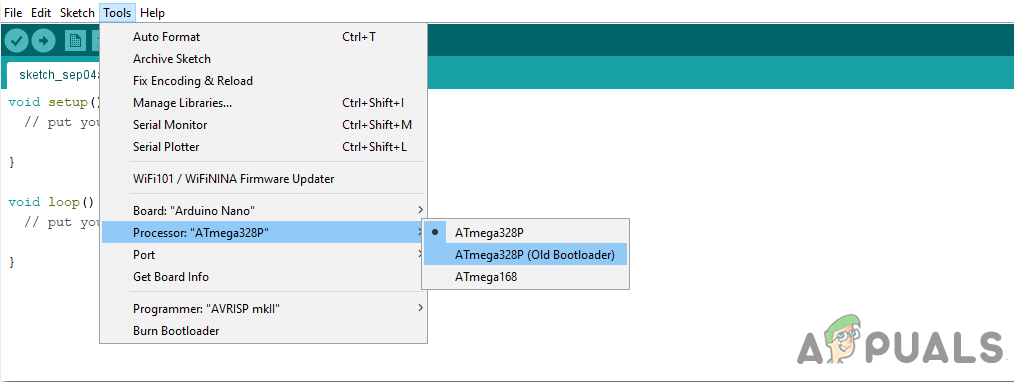
מעבד
- הורד את הקוד המצורף למטה והדבק אותו ב- IDE שלך ב- Arduino. הקלק על ה העלאה כפתור לצריבת הקוד בלוח המיקרו-בקר שלך.
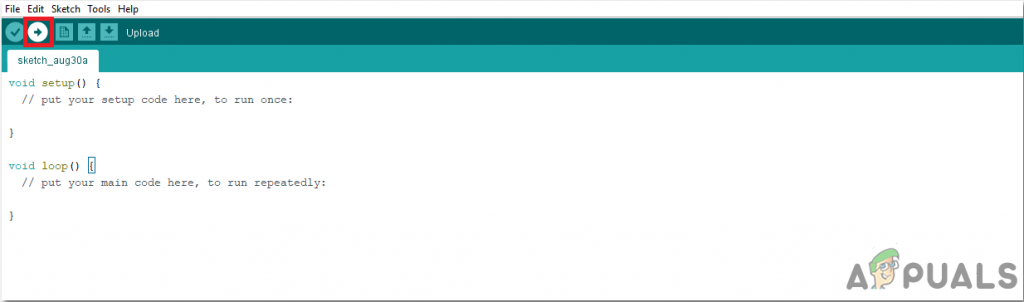
העלה





להורדת הקוד, לחץ כאן.
שלב 6: הבנת הקוד
הקוד של פרויקט זה די מעיר וקל מאוד להבנה. אך עדיין, מוסבר בקצרה להלן.
1. בהתחלה מאותתים סיכות של הארדואינו אשר יתחברו מאוחר יותר לנורית ולמזמז. כמו כן, מכריזים על משתנה שיאחסן ערכים מסוימים בזמן הריצה. ואז המצב הראשוני של ה- PIR מוגדר ל- LOW, מה שאומר שנאמר לו שזוהי שום תנועה בתחילה.
int ledPin = 5; // בחר את הסיכה עבור ה- LED int Buzzer = 6; // בחר את הסיכה עבור ה- Buzzer int inputPin = 2; // בחר את סיכת הקלט (עבור חיישן PIR) int pirState = LOW; // אנו מתחילים, בהנחה שלא זוהתה תנועה int val = 0; // משתנה לקריאה ואחסון מצב הסיכה לשימוש נוסף
2. הגדרת בטל () היא פונקציה בה אנו מאתחלים את הפינים של לוח הארדואינו שישמשו כ- INPUT או OUTPUT. קצב הקליטה מוגדר גם בפונקציה זו. קצב שידור הוא הסיביות לשנייה בהן המיקרו-בקר מתקשר עם המכשירים החיצוניים.
הגדרת חלל () {pinMode (ledPin, OUTPUT); // להכריז על LED כמצב pinMode (זמזם, OUTPUT); // להכריז על זמזם כ- pinMode פלט (inputPin, INPUT); // להכריז על חיישן כקלט Serial.begin (9600); // הגדר קצב שידור שווה ל 9600}3. לולאה בטלה () היא פונקציה הפועלת שוב ושוב בלולאה. בפונקציה זו, המיקרו-בקר מתוכנת כך שאם הוא מזהה תנועה, הוא ישלח אות אל הבאזר והנורית ויבקע אותם. אם התנועה לא מזוהה, היא לא תעשה שום דבר.
loop loop () {val = digitalRead (inputPin); // קרא ערך קלט מחיישן PIR אם (val == HIGH) // אם מתגלה תנועה לפני {digitalWrite (ledPin, HIGH); // להדליק את ה- LED DigitalWrite (זמזם, 1); // הפעל עיכוב של זמזם (5000); // ליצור עיכוב של חמש שניות אם (pirState == LOW) {// אם המצב נמוך בהתחלה, פירושו שלא זוהתה תנועה לפני // הרגע הפעלנו את Serial.println ('זוהה תנועה!'); // הדפס צג סדרתי על כך שהתנועה מזוהה pirState = HIGH; // pirState מוגדר ל- HIGH}} אחר {digitalWrite (ledPin, LOW); // כבה את ה- LED digitalWrite (זמזם, 0); // כבה את הבאזר אם (pirState == HIGH) {// אם המדינה גבוהה בהתחלה, פירוש הדבר שתנועה זוהתה לפני // הרגע ביטלנו את Serial.println ('התנועה הסתיימה!'); // הדפס על צג סדרתי שלתנועה יש סוף pirState = LOW; // pirState מוגדר ל- LOW}}}אז זה היה כל ההליך להכנת מעגל אזעקת אבטחה בבית באמצעות חיישן PIR. עכשיו אתה יכול להתחיל לעבוד ולהפעיל אזעקת אבטחה במחיר נמוך ויעיל משלך.